
MIT Engineers Have Created a Robot That Flies Like a Bee
MIT engineers have built a microrobot that matches the speed and agility of a real insect which is a breakthrough powered by a clever two-part AI controller.
INNOVATIONFEATUREDGREEN TECHAI
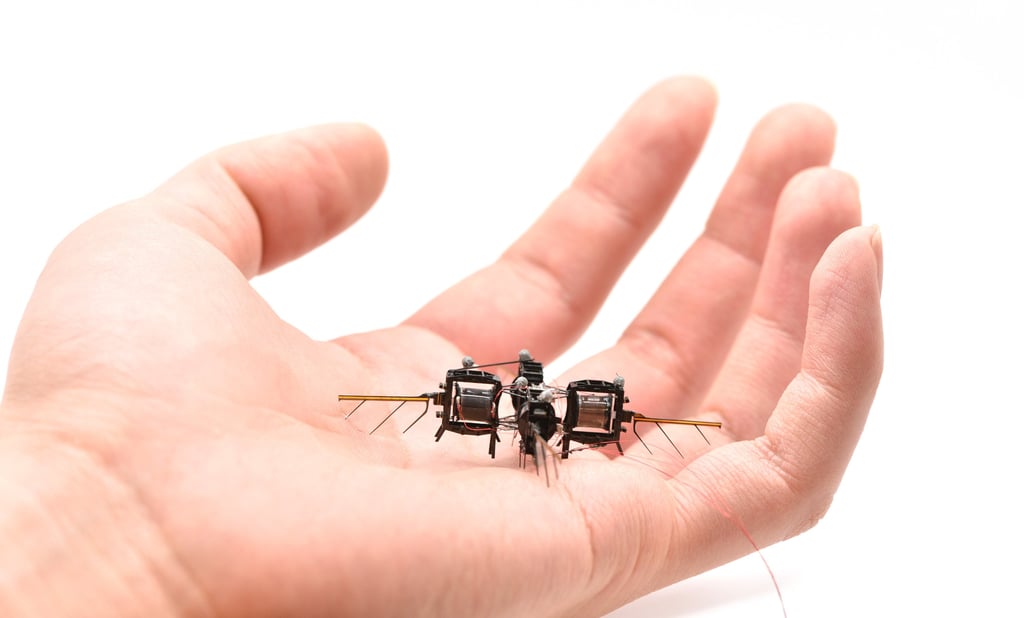
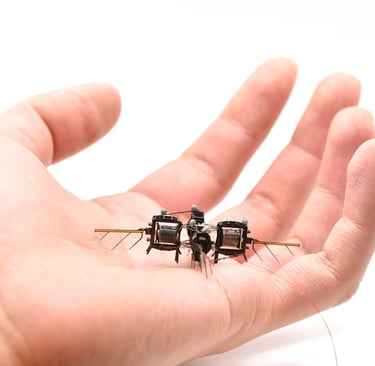
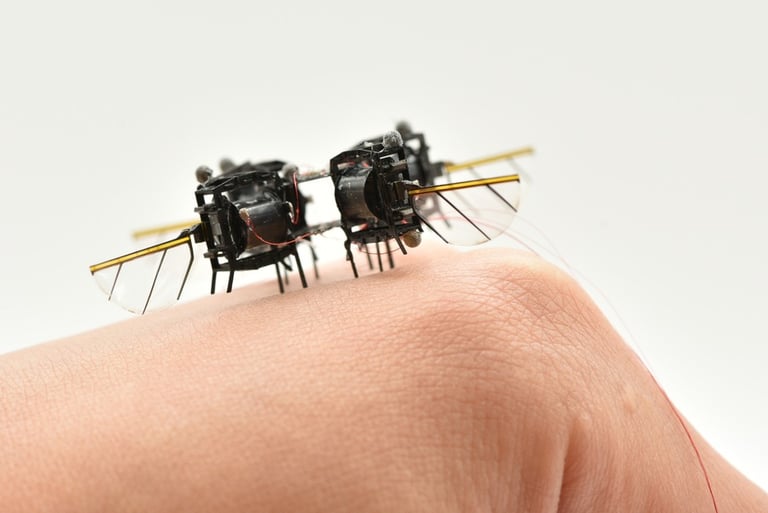
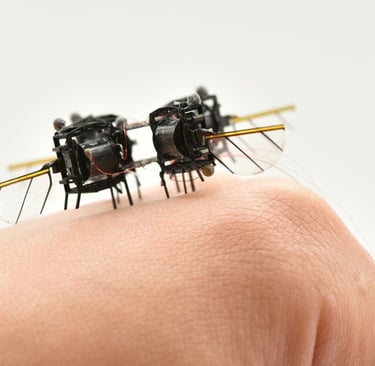
Credits: Credit: Courtesy of the Soft and Micro Robotics Laboratory
Researchers at MIT have demonstrated an aerial microrobot capable of flying with the speed and agility of a real insect. The tiny device — lighter than a paperclip and roughly the size of a microcassette — can execute continuous body flips, swerve through wind gusts, and hold a trajectory with remarkable precision. Its flight performance now rivals that of actual bugs.
A brain problem, not a body problem
For years, the challenge wasn't building wings small enough or muscles strong enough. Associate Professor Kevin Chen's group at MIT's Soft and Micro Robotics Laboratory had been steadily refining the hardware — developing larger, flapping wings powered by squishy artificial muscles that beat at extraordinary speed. The robot's body was ready for acrobatics. Its brain was not.
The old controller — the software that tells the robot where it is and where to go — was hand-tuned by a human. That worked for slow, smooth trajectories. But aggressive, insect-like flight demands something far more capable: a controller that can handle uncertainty, make rapid corrections, and plan complex maneuvers in real time. Running such a controller live would be far too computationally intensive for the lightweight robot.
"We want to be able to use these robots in scenarios that more traditional quad copter robots would have trouble flying into, but that insects could navigate."
— Kevin Chen, Associate Professor, MIT EECS
Teaching a robot to think fast
The solution came from a collaboration between Chen's hardware team and the aerospace controls lab of Professor Jonathan How. Together, they built a two-step AI system that delivers both raw power and speed.
The first component is a model-predictive controller — a mathematically sophisticated planner that simulates the robot's dynamics, anticipates how it will behave, and computes the optimal sequence of moves for any maneuver. It can plan somersaults, aggressive tilts, and rapid turns while respecting the robot's physical limits. It is computationally expensive, but deeply capable.
That expert planner then trains a deep-learning policy through imitation learning — essentially distilling its hard-won knowledge into a much leaner AI model that can run in real time. The policy takes in the robot's position and outputs control commands — thrust, torque, direction — almost instantly.
The critical ingredient was a robust training method that generates just enough data to teach the policy everything it needs for aggressive maneuvers without overwhelming it. "The robust training method is the secret sauce of this technique," How explains.
Results that match the biology
In experiments, the two-step approach drove a 447% increase in top speed and a 255% jump in acceleration compared to the team's prior best. During a test of 10 consecutive somersaults completed in 11 seconds, the robot never strayed more than four or five centimeters from its planned path — even when fans blasted it with wind gusts of over a meter per second.
The team also demonstrated saccade movement — a behavior in which real insects pitch sharply, dash to a new position, and then pitch the other way to brake. This helps insects orient themselves and see clearly. Replicating it in a robot opens the door to onboard cameras and sensors that could let these machines perceive their environment without relying on external motion-capture systems.
For the researchers, what lies ahead is as exciting as what they've already achieved: adding sensors and cameras, enabling outdoor flight, and exploring how swarms of these robots might coordinate to avoid each other. A paradigm shift, Chen suggests, may already be underway. "I hope this paper signals that we can develop a new control architecture that is high-performing and efficient at the same time."
Why any of this matters?
A third of the world's food production depends on bees — almonds, apples, blueberries, cucumbers, and hundreds of other crops exist because bees visit their flowers. Over 75% of the world's flowering plants rely on insect pollination, directly supporting food sources for the majority of the world's terrestrial animals. Research shows that over 100,000 plant species would become extinct if bees stopped pollinating.
But bee populations are collapsing. Since 1947, the global bee population has decreased by 60%. More than 700 native US bee species are in decline. The American bumblebee has disappeared from eight states entirely. The rusty patched bumblebee lost 90% of its numbers before landing on the endangered species list.
The causes are well understood: pesticides — especially neonicotinoids — harm bees' navigation, memory, and reproduction; urban sprawl and monoculture farming strip away the wildflowers and nesting sites they depend on; and shifting temperatures disrupt blooming cycles, leaving colonies weakened and vulnerable.
The pollination mission
This is where MIT's tiny robot connects to something much larger. Researchers envision swarms of these robots emerging from mechanical hives to rapidly and precisely pollinate crops — working in indoor farms and multilevel warehouses where natural pollinators can't reach, and filling the gaps left behind by declining bee populations.
The team is now working on an onboard camera that would allow the robot to recognise a flower, determine its distance, and plan a precise path to land on it — the kind of gentle, targeted interaction that no larger drone could ever perform without damaging the plant. Their next goals are extending flight time beyond 10,000 seconds and improving landing precision — the two milestones needed before these robots could realistically operate in agricultural settings.
Why we should protect bees, not just replace them
It's important to be clear about what robotic pollination is and isn't. It's a contingency plan — not a reason to give up on the bees we still have.
If native bee populations were to collapse, the consequences would cascade through entire ecosystems: flowering plants would fail to reproduce, the animals that depend on them would begin to die, and the chain of losses would only continue from there. Bees also give us honey, support rural livelihoods, and serve as environmental indicators — when they disappear, it means something is already deeply wrong with the ecosystem around us. University of Florida Entomology and Nematology
Protecting bees means advocating for bans on harmful pesticides, planting native wildflowers, and pushing for policies that prioritise pollinator health. Every garden, every policy decision, every choice to reduce chemical use counts. The Bee Conservancy
The ideal outcome isn't a world where robots pollinate our food because bees are gone. It's a world where both coexist — where MIT's microrobots extend what's possible in agriculture, while the bees that have sustained life on Earth for millions of years continue to do what they've always done.




Nopolluting © 2026
Nopolluting combines the power of efficiency consultation and media expertise to drive sustainability and environmental responsibility for businesses.
Entrepreneurs only
Subscribe to stay ahead with weekly tips on running a more efficient business
We care about your data in our privacy policy.